#include <p24FJ64GA002.h>#include "types.h"#include "table.h"#include "ssm.h"#include "extmeter.h"#include "main.h"#include "libadc.h"#include "libdac.h"#include "librtc.h"#include "libuart.h"#include "libps2.h"#include "libfontx2.h"#include "libvideo.h"
main.cのインクルード依存関係図

関数 | |
| _CONFIG1 (JTAGEN_OFF &GCP_OFF &GWRP_OFF &BKBUG_OFF &WINDIS_OFF &COE_OFF &ICS_PGx1 &FWDTEN_ON &WDTPS_PS256) _CONFIG2(IESO_OFF &FNOSC_FRCPLL &FCKSM_CSDCMD &OSCIOFNC_ON &IOL1WAY_OFF &I2C1SEL_PRI &POSCMOD_NONE) const INFO_T info | |
| int | main (void) |
関数
| _CONFIG1 | ( | JTAGEN_OFF &GCP_OFF &GWRP_OFF &BKBUG_OFF &WINDIS_OFF &COE_OFF &ICS_PGx1 &FWDTEN_ON & | WDTPS_PS256 | ) | const |
| int main | ( | void | ) |
参照先 ADC::adc, adc, ADC_init(), CONFIG_init(), CONFIG_load(), DAC_init(), EXTMETER_BOOST, EXTMETER_init(), EXTMETER_main(), FONTX2_init(), GPIO_LED, KXM_OFF, KXM_ON, LED_OFF, PS2_init(), PS2_main(), rtc, RTC_get_ticks(), RTC_init(), SCREEN_init(), SCREEN_main(), SSM_init(), SSM_main(), RTC::tick, UART1_init(), UART2_init(), VIDEO_init(), VIDEO_locate(), と VIDEO_putstr().
{
unsigned int tick;
/* ポートの入出力モード設定 */
/* FEDCBA9876543210 */
TRISA = 0b0000000000000011;
TRISB = 0b0000111101100001;
LED_OFF();
KXM_OFF();
/* CPUクロックを設定する. オーバークロック時は、画面描画が若干早くなる */
/* CPUの個体差があると思われるので、十分に検証を行うこと */
CLKDIV = 0;
// OSCTUN = 0b0000000000011111; /* Fosc = 8.96MHz, Fcy = 17.92MHz, Core 35.84MHz */
OSCTUN = 0b0000000000000000; /* Fosc = 8.00MHz, Fcy = 16.00MHz, Core 32.00MHz */
/* CPUの割り込みレベル設定 */
SRbits.IPL = 0;
/* 電源が安定するまで待つ */
RTC_init();
ADC_init();
tick = rtc.tick;
while(RTC_get_ticks(tick, rtc.tick) < 1000) ClrWdt();
KXM_ON();
/* 各ドライバ/モジュール/割込関数 libxxx の初期化 */
FONTX2_init();
VIDEO_init();
UART1_init(115200);
UART2_init( 4800);
DAC_init();
PS2_init();
/* アプリケーション層の初期化 */
SSM_init();
SCREEN_init();
EXTMETER_init(EXTMETER_BOOST);
CONFIG_init();
/* WDTリセットされたとき、自動ロードしない */
if (RCONbits.WDTO){
VIDEO_locate( 2, 1);
VIDEO_putstr("WDT Error!");
VIDEO_locate( 2, 2);
VIDEO_putstr("Initializing systems...");
while(RTC_get_ticks(tick, rtc.tick) < 50000) ClrWdt();
/* 加速度センサが無いとき、自動ロードしない */
} else if (adc.adc[0] < 20 && adc.adc[1] < 20 && adc.adc[2] < 20) {
VIDEO_locate( 2, 1);
VIDEO_putstr("Can't find Accelerometer.");
VIDEO_locate( 2, 2);
VIDEO_putstr("Initializing systems...");
while(RTC_get_ticks(tick, rtc.tick) < 50000) ClrWdt();
/* 環境設定の自動ロード */
} else {
VIDEO_locate( 2, 1);
VIDEO_putstr("Now loading configurations...");
VIDEO_locate( 2, 2);
if(CONFIG_load()){
VIDEO_putstr("Success");
while(RTC_get_ticks(tick, rtc.tick) < 5000) ClrWdt();
} else {
VIDEO_putstr("Error");
while(RTC_get_ticks(tick, rtc.tick) < 50000) ClrWdt();
}
}
/* メインループ */
while(1){
ClrWdt();
/* LEDを点滅させる。CPU負荷が高いとき、フラッシュが遅くなる */
GPIO_LED = ‾GPIO_LED;
/* シンプルなラウンドロビンのマルチタスク (^^; */
SSM_main();
SCREEN_main();
PS2_main();
EXTMETER_main();
}
/* ウォッチドックタイマによるリセットを発生させる */
while(1);
return(0);
}
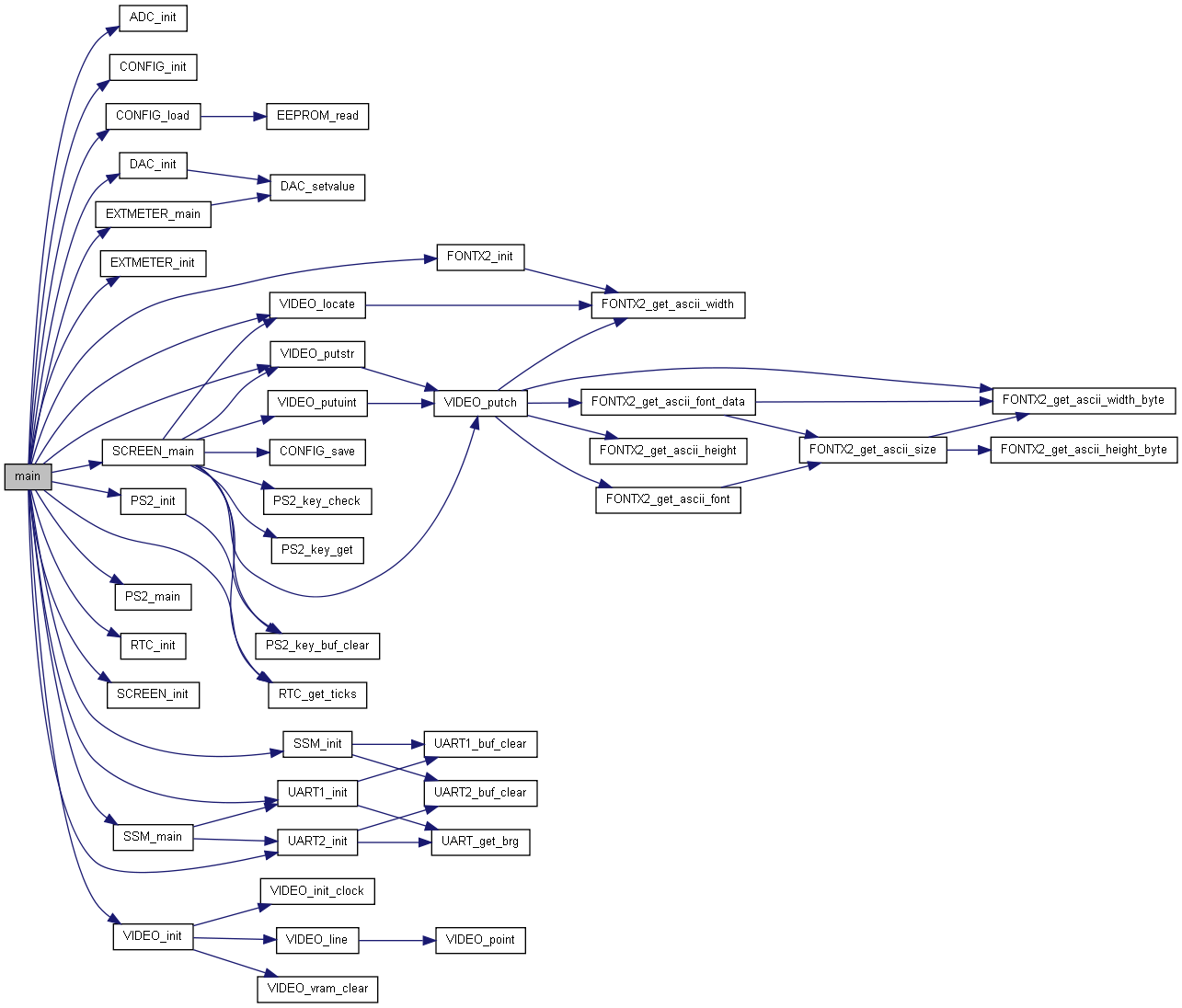
関数の呼び出しグラフ: